Si el campo de actuación elegido para situar la praxis de la ingeniería y el diseño como procesos y el dibujo (expresión gráfica o gráfico-plástica) como instrumento es el espacio-tiempo, habrá que hacer ante todo algunas precisiones conceptuales para situar el movimiento como base de cualquier modelo.

Alguna explicación para los muy profanos:
En cualquier espacio la posición de un punto la define un vector, que en función de un origen fijo nos da la distancia y la dirección de ese punto (extremo del vector). Cuando esa posición depende de un parámetro, es decir, de una variable "independiente" a la que vamos dando valores sucesivos, decimos que es función de él.
Esto vale para cualquier dimensión del espacio. Puede ser el recorrido unidimensional a lo largo de una línea, que podemos definir en un espacio bidimensional con el recorrido como variable dependiente y el tiempo invertido como variable independiente. En un espacio de dos dimensiones la representación requiere un espacio tridimensional, con dos variables espaciales dependientes de una temporal independiente, Y el espacio ordinario, con la variable tiempo, se convierte en tetradimensional. El esquema se puede trasladar a espacios de más dimensiones, como los virtuales que utiliza la informática, con dimensiones para expresar color, masa o cualquier otra variable física que pueda modificarse con el tiempo.
En un movimiento, tanto la posición como la velocidad o la aceleración dependen del parámetro "tiempo", al que se dan valores sucesivos en intervalos tan pequeños como sea necesario. Ese es el concepto de continuidad, y en los movimientos reales y "no catastróficos" a un tiempo continuo corresponden valores que son funciones continuas de él. Quiere esto decir que no puede haber cambios instantáneos ni de la posición ni de la velocidad o la aceleración. Porque un cambio instantáneo de posición requiere una velocidad infinita, y si es de velocidad una aceleración infinita y cualquiera que conduzca un vehículo sabe que no hay cambios bruscos de aceleración, porque por más potente que sea el coche acelerar también lleva su tiempo.
Se utiliza la mayúscula "delta" para indicar un "incremento", esto es, un cambio sensible en el tiempo, al que corresponden en función de él cambios sensibles en las demás variables.
Como ya he dicho, este procedimiento puede utilizarse para movimientos reales, para simulaciones de los mismos o para cualquier "espacio vectorial", aunque el parámetro no sea el tiempo sino cualquier otra variable independiente.

Situemos en nuestro espacio de variables dependientes (no en el espacio-tiempo) una trayectoria y diferentes posiciones que son función del tiempo. Representamos en él los cambios correspondientes de posición, dados por un vector dirección, de velocidad, que incluye los cambios de dirección, y de aceleración, que también debe incluir cambios de dirección de la velocidad, bien manteniendo la misma dirección (y hablaremos de aceleración longitudinal) o girando en ángulo recto (aceleración transversal o centrípeta):

Si no hay aceleración centrípeta se mantiene la dirección del movimiento:

Y si se mantiene la velocidad sobre la línea, pero no la dirección del movimiento, solamente hay aceleración transversal:

En la siguiente imagen se consideran las trayectorias en función de combinaciones de estas posibilidades, con los casos "puros" de movimiento rectilíneo uniforme y circular uniforme, el más complejo rectilíneo acelerado y el caso general. Los puntos indicados en las trayectoria corresponden a intervalos de tiempo iguales:

Recordaré a los no iniciados que la derivada es el cociente entre la función y la variable de que depende cuando el incremento de ésta tiende a ser infinitamente pequeño. Y que las derivadas también se pueden derivar, por lo que el concepto es aplicable a la velocidad instantánea (que relaciona posición y tiempo), a la aceleración instantánea (que relaciona la aceleración con el tiempo) y así sucesivamente, lo que introduce distintos grados de continuidad.
Cuando la primera derivada (velocidad) es nula no hay movimiento. Si lo es la segunda (aceleración) el movimiento es uniforme, si lo es la tercera no hay cambio de aceleración y es uniformemente acelerado. Y así podríamos seguir.
Los casos reales pueden simplificarse por tramos sustituyendo los intervalos curvos por rectos (modelo poligonal) o circulares (modelo circular). Ambos son aproximaciones, que mejoran al reducir el tamaño del intervalo:

El concepto de tangencia surge de modo semejante al considerar el límite a que tiende la dirección del segmento que une dos puntos al aproximar sobre a trayectoria curva el segundo al primero, esto es, cuando el intervalo del parámetro tiempo "tiende a cero":

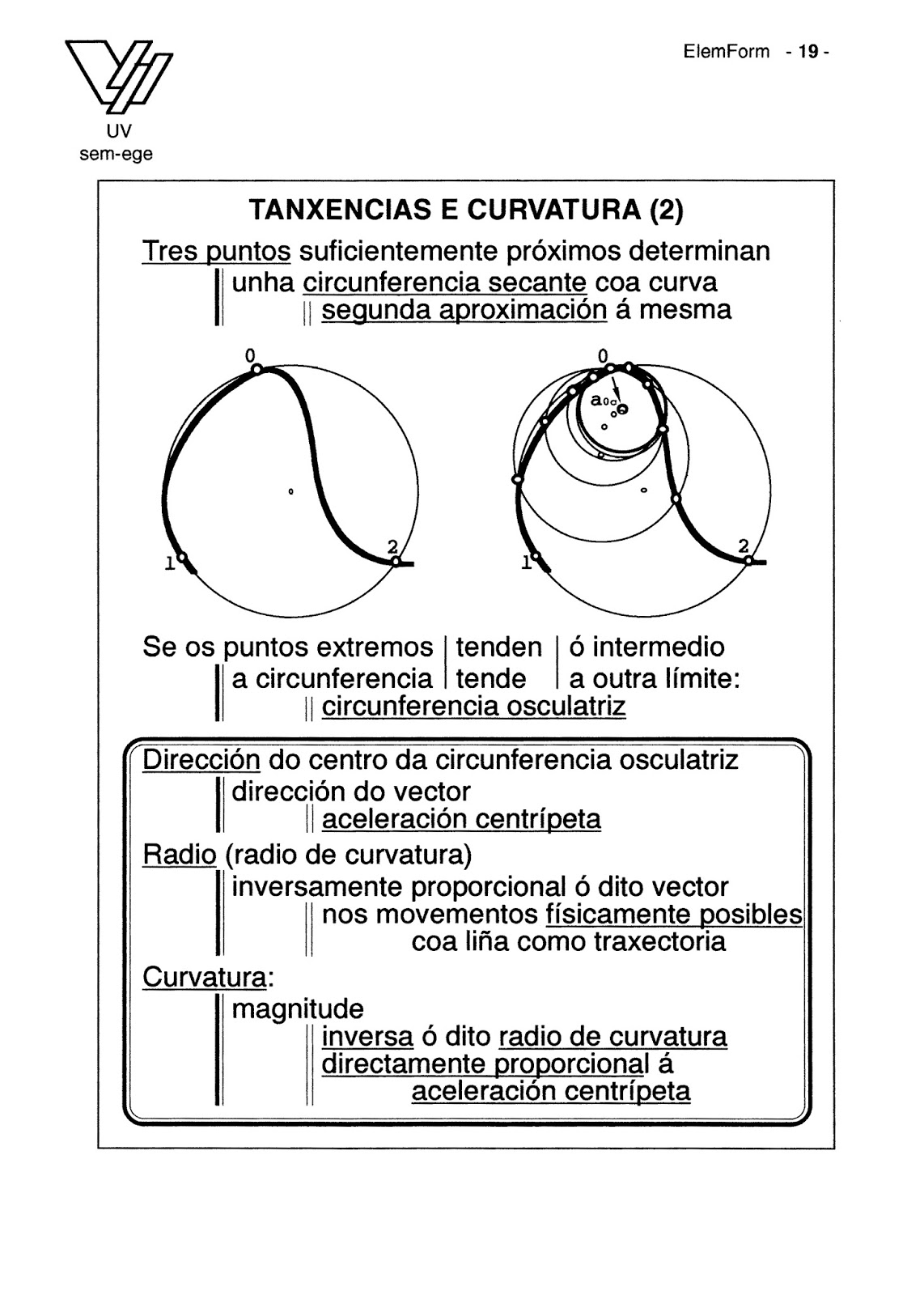
Y de modo semejante, como límite, puede definirse la curvatura en un punto. Se eligen tres puntos sucesivos y se sustituye la curva por una circunferencia que pase por ellos. Al aproximar los puntos extremos al intermedio la circunferencia se va modificando, con una adaptación cada vez mejor, puesto que los cambios de curvatura tampoco pueden se bruscos y son menores en tiempos menores. El límite a que se tiende cuando los intervalos "tienden a cero" nos define la curvatura en ese punto, como la magnitud inversa del radio de la circunferencia limite:
Y nada más por hoy. Seguiremos con los conceptos referidos a sistemas de coordenadas.
No hay comentarios:
Publicar un comentario